In English
Тензор
ускорений
Из
проекта Викизнание
Тензор ускорений — антисимметричный тензор,
описывающий 4-ускорение частиц и состоящий
из шести компонент. При этом данные компоненты являются компонентами двух
трёхмерных векторов – напряжённости поля ускорений, и соленоидального вектора
ускорений. С помощью тензора ускорений определяется тензор энергии-импульса
поля ускорений, уравнения поля ускорений и плотность 4-силы. Поле
ускорений в веществе является компонентой общего
поля.
Содержание
- 1
Определение
- 2
Выражение для компонент
- 3
Свойства тензора
- 4 Поле
ускорений
- 5
Использование в ковариантной теории гравитации
- 5.1
Тензор энергии-импульса поля ускорений
- 5.2
Действие и Лагранжиан
- 5.3
Обобщённая скорость и Гамильтониан
- 6
Специальная теория относительности
- 7
Другие теории
- 8 См.
также
- 9
Ссылки
- 10
Внешние ссылки
Определение
Выражение для тензора ускорений
можно найти в работах Федосина, где тензор определяется через 4-ротор: [1] [2]
![]()
Здесь 4-потенциал поля
ускорений ![]() определяется по формуле:
определяется по формуле:
![]()
где
![]() –
скалярный потенциал,
–
скалярный потенциал, ![]() – векторный потенциал поля ускорений,
– векторный потенциал поля ускорений, ![]() – скорость света.
– скорость света.
Выражение для
компонент
С помощью (1) можно вычислить вектор
напряжённости поля ускорений и соленоидальный вектор ускорений:
![]()
![]()
причём во втором выражении тройка
чисел ![]() состоит из неповторяющихся наборов 1,2,3; или
2,1,3; или 3,2,1 и т.д.
состоит из неповторяющихся наборов 1,2,3; или
2,1,3; или 3,2,1 и т.д.
В векторной записи можно записать:
![]()
![]()
Тензор ускорений состоит из
компонент указанных векторов:
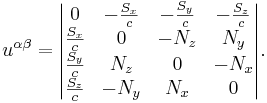
Переход к тензору ускорений с
контравариантными индексами осуществляется путём двойного умножения на
метрический тензор:
![]()
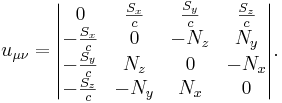
В рамках специальной теории относительности этот тензор
имеет вид:
При этом для векторов, связанных с
отдельной точечной частицей, рассматриваемой как твёрдое тело, можно записать:
![]()
![]()
где
 ,
, ![]() – скорость частицы.
– скорость частицы.
Для преобразования компонент тензора
ускорений из одной инерциальной системы отсчёта в другую следует учитывать
правило преобразования тензоров. Если система отсчёта K’ движется с
произвольной постоянной скоростью ![]() относительно неподвижной системы отсчёта K, а
оси систем координат параллельны друг другу, напряжённость поля ускорений и
соленоидальный вектор ускорений преобразуются так:
относительно неподвижной системы отсчёта K, а
оси систем координат параллельны друг другу, напряжённость поля ускорений и
соленоидальный вектор ускорений преобразуются так:
![{\mathbf {S}}^{\prime }={\frac {{\mathbf {V}}}{V^{2}}}({\mathbf {V}}\cdot {\mathbf {S}})+{\frac {1}{{\sqrt {1-{V^{2} \over c^{2}}}}}}\left({\mathbf {S}}-{\frac {{\mathbf {V}}}{V^{2}}}({\mathbf {V}}\cdot {\mathbf {S}})+[{\mathbf {V}}\times {\mathbf {N}}]\right),](at.files/image020.png)
![{\mathbf {N}}^{\prime }={\frac {{\mathbf {V}}}{V^{2}}}({\mathbf {V}}\cdot {\mathbf {N}})+{\frac {1}{{\sqrt {1-{V^{2} \over c^{2}}}}}}\left({\mathbf {N}}-{\frac {{\mathbf {V}}}{V^{2}}}({\mathbf {V}}\cdot {\mathbf {N}})-{\frac {1}{c^{2}}}[{\mathbf {V}}\times {\mathbf {S}}]\right).](at.files/image021.png)
Свойства тензора
 является антисимметричным тензором 2-го
ранга, отсюда следует условие
является антисимметричным тензором 2-го
ранга, отсюда следует условие  .
Три из шести независимых компонент тензора ускорений связаны с
компонентами вектора напряжённости поля ускорений
.
Три из шести независимых компонент тензора ускорений связаны с
компонентами вектора напряжённости поля ускорений  ,
а другие три – с компонентами соленоидального вектора ускорений
,
а другие три – с компонентами соленоидального вектора ускорений  .
Ввиду антисимметричности такой инвариант, как свёртка тензора с
метрическим тензором, обращается в нуль:
.
Ввиду антисимметричности такой инвариант, как свёртка тензора с
метрическим тензором, обращается в нуль:
 .
. - Свёртка
тензора с самим собой
 является инвариантом, а свёртка
произведения тензоров с символом Леви-Чивиты в виде
является инвариантом, а свёртка
произведения тензоров с символом Леви-Чивиты в виде  является псевдоскалярным инвариантом.
Указанные инварианты в специальной теории относительности выражаются так:
является псевдоскалярным инвариантом.
Указанные инварианты в специальной теории относительности выражаются так:
![]()
![]()
- Детерминант
тензора также является лоренцевским инвариантом:
![]()
Поле ускорений
Через тензор ускорений записываются
уравнения поля ускорений:
![]()
![]()
где
![]() есть массовый 4-ток,
есть массовый 4-ток, ![]() – плотность массы в сопутствующей системе
отсчёта,
– плотность массы в сопутствующей системе
отсчёта, ![]() – 4-скорость движения элемента вещества,
– 4-скорость движения элемента вещества, ![]() – постоянная поля ускорений.
– постоянная поля ускорений.
Вместо (2) можно использовать
выражение:
![]()
Равенство (2) выполняется
тождественно, что доказывается подстановкой в него определения для тензора
ускорений согласно (1). Если подставить в (2) компоненты тензора ![]() , можно получить два векторных уравнения:
, можно получить два векторных уравнения:
![]()
![]()
Согласно (5), соленоидальный вектор
ускорений не имеет источников, так как его дивергенция равна нулю. Из (4)
следует, что изменение во времени соленоидального вектора ускорений приводит к
появлению ротора напряжённости поля ускорений.
Уравнение (3) связывает поле
ускорений с его источником в виде массового 4-тока. В пространстве Минковского
специальной теории относительности вид уравнения упрощается и становится
следующим:
![]()
![]()
где
![]() – плотность движущейся массы,
– плотность движущейся массы, ![]() – плотность тока массы.
– плотность тока массы.
Согласно первому из этих уравнений,
напряжённость поля ускорений имеет источник в виде плотности вещества, а по
второму уравнению ток массы либо изменение во времени вектора напряжённости
поля ускорений порождают круговое поле соленоидального вектора ускорений.
Из (3) и (1) можно получить следующее: [1]
![]()
Уравнение непрерывности для массового 4-тока ![]() является калибровочным условием, которое
используется для получения уравнения поля (3) из принципа наименьшего действия.
С другой стороны, свёртка тензора ускорений и тензора Риччи равняется нулю,
является калибровочным условием, которое
используется для получения уравнения поля (3) из принципа наименьшего действия.
С другой стороны, свёртка тензора ускорений и тензора Риччи равняется нулю,
![]() как следствие антисимметричности тензора
ускорений.
как следствие антисимметричности тензора
ускорений.
В пространстве Минковского ковариантная производная превращается в частную
производную, и уравнение непрерывности становится таким:
![]()
Волновое уравнение для тензора ускорений выглядит следующим образом: [3]
![]()
Это уравнение справедливо при условии, что тензор Риччи определяется как результат
свёртки метрического тензора и тензора кривизны в виде [4]
![]()
Если же тензор Риччи определяется в виде [5]
![]()
то волновое уравнение для тензора ускорений будет таким:
![]()
Использование в
ковариантной теории гравитации
Тензор
энергии-импульса поля ускорений
С помощью тензора
ускорений в ковариантной теории гравитации
строится тензор энергии-импульса поля
ускорений:
![]() .
.
Ковариантная производная от тензора
энергии-импульса поля ускорений со смешанными индексами задаёт плотность
4-силы: [3]
![]()
здесь использован
оператор производной по собственному времени ![]() .
.
Плотность 4-силы может быть записана
для временной и пространственной компонент в виде двух выражений:
![]()
![]()
где
![]() обозначает четырёхмерный
пространственно-временной интервал,
обозначает четырёхмерный
пространственно-временной интервал, ![]()
Действие и
Лагранжиан
Полный Лагранжиан для вещества в
гравитационном и электромагнитном полях включает в себя тензор ускорений и
содержится в функции действия: [1]
![]()
![]()
где ![]() – функция Лагранжа или лагранжиан,
– функция Лагранжа или лагранжиан, ![]() – дифференциал времени используемой системы
отсчёта,
– дифференциал времени используемой системы
отсчёта, ![]() – некоторый коэффициент,
– некоторый коэффициент, ![]() – скалярная кривизна,
– скалярная кривизна, ![]() – космологическая константа, характеризующая
плотность энергии рассматриваемой системы в целом, и потому являющаяся функцией
системы,
– космологическая константа, характеризующая
плотность энергии рассматриваемой системы в целом, и потому являющаяся функцией
системы, ![]() – скорость света, как мера скорости
распространения электромагнитного и гравитационного взаимодействий,
– скорость света, как мера скорости
распространения электромагнитного и гравитационного взаимодействий, ![]() – гравитационный
4-потенциал,
– гравитационный
4-потенциал, ![]() – гравитационная
постоянная,
– гравитационная
постоянная, ![]() – тензор
гравитационного поля,
– тензор
гравитационного поля, ![]() – электромагнитный 4-потенциал,
– электромагнитный 4-потенциал, ![]() – электрический 4-ток,
– электрический 4-ток, ![]() – электрическая постоянная,
– электрическая постоянная, ![]() – тензор электромагнитного поля,
– тензор электромагнитного поля, ![]() – 4-потенциал поля ускорений,
– 4-потенциал поля ускорений, ![]() и
и ![]() – постоянные поля ускорений и поля давления,
соответственно,
– постоянные поля ускорений и поля давления,
соответственно, ![]() – тензор ускорений,
– тензор ускорений, ![]() – 4-потенциал поля давления,
– 4-потенциал поля давления, ![]() – тензор
поля давления,
– тензор
поля давления, ![]() – инвариантный 4-объём, выражаемый через
дифференциал временной координаты
– инвариантный 4-объём, выражаемый через
дифференциал временной координаты ![]() ,
через произведение
,
через произведение ![]() дифференциалов
пространственных координат, и через квадратный корень
дифференциалов
пространственных координат, и через квадратный корень ![]() из детерминанта
из детерминанта ![]() метрического тензора, взятого с отрицательным
знаком.
метрического тензора, взятого с отрицательным
знаком.
Варьирование функции действия по
4-координатам даёт уравнение движения элемента вещества в гравитационном и
электромагнитном полях и в поле
давления:
![]()
здесь первый член в правой части
есть плотность гравитационной силы, выраженная с помощью тензора
гравитационного поля, второй член задаёт электромагнитную силу Лоренца для
плотности заряда ![]() ,
измеряемой в сопутствующей системе отсчёта, последний член определяет силу
давления.
,
измеряемой в сопутствующей системе отсчёта, последний член определяет силу
давления.
Варьирование функции действия по
4-потенциалу поля ускорений приводит к уравнению поля ускорений (3).
Обобщённая скорость
и Гамильтониан
Ковариантный 4-вектор обобщённой
скорости, рассматриваемый как 4-потенциал общего поля,
определяется выражением:
![]()
С учётом обобщённой скорости
Гамильтониан содержит в себе тензор ускорений и имеет вид:
![]()
где
![]() и
и ![]() обозначают временные компоненты
4-векторов
обозначают временные компоненты
4-векторов ![]() и
и ![]() .
.
В системе отсчёта, неподвижной
относительно центра импульсов системы, Гамильтониан определяет инвариантную энергию системы системы.
Тензор ускорений используется для вычисления обобщённого 4-импульса, [6] энергии, импульса и 4-импульса физической
системы, [7] а также
псевдотензора момента импульса. [2]
Специальная теория
относительности
Изучая лоренц-ковариантность 4-силы,
Friedman и Scarr нашли не
полную ковариантность выражения для 4-силы в виде ![]() [8] Это привело их к выводу, что 4-ускорение должно
быть выражено с помощью некоторого антисимметричного тензора
[8] Это привело их к выводу, что 4-ускорение должно
быть выражено с помощью некоторого антисимметричного тензора ![]() :
:
![]()
Исходя из анализа различных видов
движения, они оценили требуемые для них значения компонент тензора ускорений,
дав тем самым этому тензору косвенное определение.
Из сравнения с (6) следует, что
тензор ![]() с точностью до знака и постоянного множителя
совпадает с тензором ускорений
с точностью до знака и постоянного множителя
совпадает с тензором ускорений ![]() в случае, когда рассматривается прямолинейное
движение твёрдого тела без вращения. Действительно, тогда 4-потенциал поля
ускорений совпадает с 4-скоростью,
в случае, когда рассматривается прямолинейное
движение твёрдого тела без вращения. Действительно, тогда 4-потенциал поля
ускорений совпадает с 4-скоростью, ![]() . В
результате величина
. В
результате величина ![]() в правой части (6) обнуляется, поскольку
справедливы соотношения:
в правой части (6) обнуляется, поскольку
справедливы соотношения: ![]() ,
, ![]() . С
учётом этого в (6) можно поднять индекс
. С
учётом этого в (6) можно поднять индекс ![]() и
сократить плотность массы, что даёт следующее:
и
сократить плотность массы, что даёт следующее:
![]()
Mashhoon и Muench рассматривали преобразование инерциальных систем
отсчёта, сопутствующих ускоренной системе отсчёта и
пришли к соотношению: [9]
![]()
Тензор ![]() имеет те же свойства, что и тензор
ускорений
имеет те же свойства, что и тензор
ускорений ![]()
Другие теории
В статьях, [10] [11]
[12] посвящённых модифицированной ньютоновской динамике (МОНД) в
тензор-вектор-скалярной гравитации, появляются скалярная функция ![]() или
или ![]() ,
определяющая некоторое скалярное поле, 4-вектор
,
определяющая некоторое скалярное поле, 4-вектор
![]() или
или ![]() , 4-тензор
, 4-тензор
![]() или
или ![]()
Анализ этих величин в
соответствующем Лагранжиане показывает, что скалярная функция ![]() или
или ![]() соответствуют скалярному потенциалу
соответствуют скалярному потенциалу ![]() поля ускорений; 4-вектор
поля ускорений; 4-вектор ![]() или
или ![]() соответствуют 4-потенциалу поля
ускорений
соответствуют 4-потенциалу поля
ускорений ![]() ; 4-тензор
; 4-тензор
![]() или
или ![]() соответствуют тензору ускорений
соответствуют тензору ускорений ![]() .
.
Как известно, поле ускорений
предназначено не для объяснения ускоренного движения, а для его точного
описания. В таком случае можно предположить, что тензор-вектор-скалярные теории
не могут претендовать на объяснение кривых вращения галактик. В лучшем случае
они могут служить только для описания движения, например для описания вращения
звёзд в галактиках или вращения галактик в скоплениях галактик.
См. также
- Поле ускорений
- Тензор электромагнитного поля
- Тензор гравитационного поля
- Тензор поля давления
- Тензор
поля диссипации
- Тензор
энергии-импульса поля ускорений
- Общее
поле
- Поле диссипации
- Поле
давления
- Лоренц-инвариантная теория гравитации
- Ковариантная теория гравитации
Ссылки
1. а б
в Fedosin S.G. About the cosmological constant, acceleration
field, pressure field and energy. Jordan Journal of Physics. Vol. 9 (No. 1), pp. 1-30 (2016). http://dx.doi.org/10.5281/zenodo.889304;
статья на русском языке: О космологической
постоянной, поле ускорения, поле давления и об энергии.
2. а б Fedosin S.G. Lagrangian formalism in the
theory of relativistic vector fields. International Journal of Modern Physics
A, Vol. 40, No. 02, 2450163 (2025). https://doi.org/10.1142/S0217751X2450163X. // Лагранжев формализм в теории релятивистских
векторных полей.
3.
а б Fedosin
S.G. Equations of Motion in the Theory of Relativistic Vector Fields. International
Letters of Chemistry, Physics and Astronomy, Vol. 83, pp. 12-30 (2019). https://doi.org/10.18052/www.scipress.com/ILCPA.83.12. // Уравнения движения в теории релятивистских векторных полей.
4.
Фок В.А. Теория пространства, времени и гравитации. 2-е издание. М.: Физматгиз, 1961. 568 с. Fock V. A.
The Theory of Space, Time and Gravitation (Pergamon Press, London, 1959).
5.
Landau L.D.,
Lifshitz E.M. The Classical Theory of Fields, (1951). Pergamon Press. ISBN
7-5062-4256-7.
6.
Fedosin S.G.
Generalized Four-momentum for Continuously Distributed Materials. Gazi
University Journal of Science, Vol. 37, Issue 3, pp. 1509-1538 (2024). https://doi.org/10.35378/gujs.1231793. // Обобщённый 4-импульс для
непрерывно распределённого вещества.
7. Fedosin S.G. What should we understand by the four-momentum of physical
system? Physica Scripta, Vol. 99, No. 5, 055034
(2024). https://doi.org/10.1088/1402-4896/ad3b45.
// Что
мы должны понимать под 4-импульсом физической системы?
8.
Yaakov
Friedman and Tzvi Scarr. Covariant Uniform Acceleration. Journal of Physics: Conference Series Vol. 437 (2013) 012009
doi:10.1088/1742-6596/437/1/012009.
9.
Bahram Mashhoon and Uwe Muench. Length measurement in accelerated
systems. Annalen der Physik. Vol. 11, Issue 7, P.
532–547, 2002.
10. J. D. Bekenstein and M. Milgrom, Does the Missing
Mass Problem Signal the Breakdown of Newtonian Gravity ?
Astrophys. Journ. 286, 7-14
(1984).
11. Bekenstein, J. D. (2004), Relativistic gravitation theory for the modified Newtonian
dynamics paradigm, Physical Review D 70 (8): 083509, https://dx.doi.org/10.1103%2FPhysRevD.70.083509.
12. Exirifard, Q. (2013), GravitoMagnetic Field in
Tensor-Vector-Scalar Theory, Journal of Cosmology and Astroparticle
Physics, JCAP04: 034, https://dx.doi.org/10.1088%2F1475-7516%2F2013%2F04%2F034.
Внешние
ссылки
Источник: http://sergf.ru/at.htm