На русском языке
Acceleration tensor
The acceleration
tensor is an antisymmetric tensor describing the four-acceleration of particles and
consisting of six components. Tensor components are at the same time components
of the two three-dimensional vectors – acceleration field strength and the
solenoidal acceleration vector. With the acceleration tensor the acceleration
stress-energy tensor, the acceleration field equations and the four-force density in matter are defined. Acceleration
field in matter is
a component of general field.
Contents
- 1 Definition
- 2 Expression for the components
- 3 Properties of tensor
- 4 Acceleration field
- 5 Covariant theory of gravitation
- 5.1 Acceleration stress-energy
tensor
- 5.2 Action and Lagrangian
- 5.3 Generalized velocity and
Hamiltonian
- 6 Special theory of relativity
- 7 Other theories
- 8 See also
- 9 References
- 10 External
links
Definition
Expression for the acceleration
tensor can be found in papers by Sergey Fedosin, [1]
[2] where the tensor is defined using 4-curl:
![]()
Here the acceleration
4-potential ![]() is given by:
is given by:
![]()
where ![]() is
the scalar potential,
is
the scalar potential, ![]() is
the vector potential of acceleration field,
is
the vector potential of acceleration field, ![]() –
speed of light.
–
speed of light.
Expression for the components
The acceleration field strength
and the solenoidal acceleration vector are found with the help of (1):
![]()
![]()
and in the second expression three numbers ![]() are composed of non-recurring sets
1,2,3; or 2,1,3;
or 3,2,1 etc.
are composed of non-recurring sets
1,2,3; or 2,1,3;
or 3,2,1 etc.
In vector notation can be
written:
![]()
![]()
The acceleration tensor
consists of the components of these vectors:
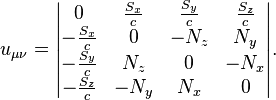
The transition to the
acceleration tensor with contravariant indices is carried out by multiplying by
double metric tensor:
![]()
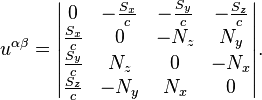
In the special relativity, this
tensor has the form:
For the vectors, related to the specific point
particle, considered as a solid body, we can write:
![]()
![]()
where  ,
, ![]() is the velocity of the particle.
is the velocity of the particle.
To transform the components of the
acceleration tensor from one inertial system to another we must take into
account the transformation rule for tensors. If the reference frame K'
moves with an arbitrary constant velocity ![]() with respect to the fixed reference system K,
and the axes of the coordinate systems parallel to each other, the acceleration
field strength and the solenoidal acceleration vector are transformed as
follows:
with respect to the fixed reference system K,
and the axes of the coordinate systems parallel to each other, the acceleration
field strength and the solenoidal acceleration vector are transformed as
follows:
![\mathbf {S}^\prime = \frac {\mathbf {V}}{V^2} (\mathbf {V}\cdot \mathbf {S}) + \frac {1}{\sqrt{1 - {V^2 \over c^2}}} \left(\mathbf {S}-\frac {\mathbf {V}}{V^2} (\mathbf {V}\cdot \mathbf {S}) + [\mathbf {V} \times \mathbf {N }] \right),](aten_files/946e5199297eb3bb8f55044bd730a98c.png)
![\mathbf {N }^\prime = \frac {\mathbf {V}}{V^2} (\mathbf {V}\cdot \mathbf {N }) + \frac {1}{\sqrt{1 - {V^2 \over c^2}}} \left(\mathbf {N }-\frac {\mathbf {V}}{V^2} (\mathbf {V}\cdot \mathbf {N }) - \frac {1}{ c^2} [\mathbf {V} \times \mathbf {S}] \right).](aten_files/59e34295dc9d0431343658672d1dd9e5.png)
Properties of tensor
 is the antisymmetric tensor of rank 2, it follows from this
condition
is the antisymmetric tensor of rank 2, it follows from this
condition  . Three of the six independent
components of the acceleration tensor associated with the components of
the acceleration field strength
. Three of the six independent
components of the acceleration tensor associated with the components of
the acceleration field strength  , and the other three – with the components of the solenoidal
acceleration vector
, and the other three – with the components of the solenoidal
acceleration vector  . Due to the antisymmetry such invariant as the contraction of the
tensor with the metric tensor vanishes:
. Due to the antisymmetry such invariant as the contraction of the
tensor with the metric tensor vanishes:  .
.- Contraction of tensor with
itself
 is an invariant, and the contraction of
tensor product with Levi-Civita symbol as
is an invariant, and the contraction of
tensor product with Levi-Civita symbol as
 is the pseudoscalar invariant.
These invariants in the special relativity can be expressed as follows:
is the pseudoscalar invariant.
These invariants in the special relativity can be expressed as follows:
![]()
![]()
- Determinant of the tensor is also
Lorentz invariant:
![]()
Acceleration field
Through the acceleration tensor
the equations of acceleration field are written:
![]()
![]()
where ![]() is the mass 4-current,
is the mass 4-current, ![]() is
the mass density in comoving reference frame,
is
the mass density in comoving reference frame, ![]() is
the 4-velocity,
is
the 4-velocity, ![]() is a constant of
acceleration field.
is a constant of
acceleration field.
Instead of (2) it is possible
use the expression:
![]()
Equation (2) is satisfied
identically, which is proved by substituting into it the definition for the
acceleration tensor according to (1). If in (2) we insert tensor components ![]() , this leads to two vector equations:
, this leads to two vector equations:
![]()
![]()
According to (5), the
solenoidal acceleration vector has no sources as its divergence vanishes. From
(4) follows that the time variation of the solenoidal acceleration vector leads
to a curl of the acceleration field strength.
Equation (3) relates the
acceleration field to its source in the form of mass 4-current. In Minkowski
space of special relativity the form of the equation is simplified and becomes:
![]()
![]()
where ![]() is
the density of moving mass,
is
the density of moving mass, ![]() is
the density of mass current.
is
the density of mass current.
According to the first of these
equations, the acceleration field strength is generated by the mass density,
and according to the second equation the mass current or change in time of the
acceleration field strength generate the circular field of the solenoidal
acceleration vector.
From (3) and (1) it can be obtained: [1]
![]()
The continuity equation for the mass 4-current ![]() is a gauge
condition that is used to derive the field equation (3) from the principle of
least action. On the other hand, the contraction of the acceleration tensor and
the Ricci tensor is equal to zero,
is a gauge
condition that is used to derive the field equation (3) from the principle of
least action. On the other hand, the contraction of the acceleration tensor and
the Ricci tensor is equal to zero,
![]() as a consequence of the antisymmetry of the
acceleration tensor.
as a consequence of the antisymmetry of the
acceleration tensor.
In Minkowski space the covariant derivative becomes the partial
derivative, and the continuity equation becomes as follows:
![]()
The wave equation for the acceleration tensor is written as: [3]
![]()
This equation is valid provided that the Ricci tensor is defined as a
result of contraction of metric tensor and curvature tensor in the form [4]
![]()
If the Ricci tensor is defined as [5]
![]()
then the wave equation for the acceleration tensor will be:
![]()
Covariant
theory of gravitation
Acceleration stress-energy tensor
With
the help of acceleration tensor in the covariant theory of gravitation
the acceleration stress-energy tensor is constructed:
![]() .
.
The covariant derivative of the acceleration
stress-energy tensor with mixed indices determines the four-force density: [3]
![]()
here the operator of proper-time-derivative with respect to proper time ![]() is used.
is used.
The density of the 4-force can be written for the time
and space component in the form of two expressions:
![]()
![]()
where ![]() denotes
a four-dimensional space-time interval,
denotes
a four-dimensional space-time interval, ![]()
Action
and Lagrangian
Total Lagrangian for the matter
in gravitational and electromagnetic fields includes the acceleration tensor
and is contained in the action function: [1]
![]()
![]()
where ![]() is
Lagrangian,
is
Lagrangian, ![]() is
differential of coordinate time,
is
differential of coordinate time, ![]() is
a certain coefficient,
is
a certain coefficient, ![]() is
the scalar curvature,
is
the scalar curvature, ![]() is
the cosmological constant, which is a function of the system,
is
the cosmological constant, which is a function of the system, ![]() is
the speed of light as a measure of the propagation speed of electromagnetic and
gravitational interactions,
is
the speed of light as a measure of the propagation speed of electromagnetic and
gravitational interactions, ![]() is
the gravitational four-potential,
is
the gravitational four-potential, ![]() is the gravitational constant,
is the gravitational constant, ![]() is
the gravitational tensor,
is
the gravitational tensor, ![]() is
the electromagnetic 4-potential,
is
the electromagnetic 4-potential, ![]() is
the electromagnetic 4-current,
is
the electromagnetic 4-current, ![]() is
the electric
constant,
is
the electric
constant, ![]() is
the electromagnetic tensor,
is
the electromagnetic tensor, ![]() is the 4-potential of acceleration
field,
is the 4-potential of acceleration
field, ![]() and
and ![]() are the constants of acceleration
field and pressure field, respectively,
are the constants of acceleration
field and pressure field, respectively, ![]() is the acceleration tensor,
is the acceleration tensor, ![]() is
the 4-potential of pressure field,
is
the 4-potential of pressure field, ![]() is
pressure field tensor,
is
pressure field tensor, ![]() is the
invariant 4-volume,
is the
invariant 4-volume, ![]() is
the square root of the determinant
is
the square root of the determinant ![]() of
metric tensor, taken with a negative sign,
of
metric tensor, taken with a negative sign, ![]() is
the product of differentials of the spatial coordinates.
is
the product of differentials of the spatial coordinates.
The variation of the action
function by 4-coordinates leads to the equation of motion of the matter unit in
gravitational and electromagnetic fields and pressure
field:
![]()
where the first term on the
right is the gravitational force density, expressed with the help of the
gravitational field tensor, second term is the Lorentz electromagnetic force
density for the charge density ![]() measured in the comoving reference frame, and
the last term sets the pressure force density.
measured in the comoving reference frame, and
the last term sets the pressure force density.
If we vary the action function
by the acceleration 4-potential, we obtain the equation of acceleration field
(3).
Generalized velocity and Hamiltonian
The
covariant 4-vector of generalized velocity, considered as 4-potential of
[[general field]], is given by the expression:
![]()
With regard to the generalized 4-velocity, the Hamiltonian contains the
acceleration tensor and has the form:
![]()
Where ![]() and
and ![]() are the time components of the 4-vectors
are the time components of the 4-vectors ![]() and
and ![]() .
.
In the
reference frame that is fixed relative to the system's
center-of-momentum frame, Hamiltonian will determine the invariant energy of the system.
The
acceleration tensor is used to calculate the generalized 4-momentum,[6] the energy, momentum, and 4-momentum of a
physical system, [7] as well
as the angular momentum pseudotensor. [2]
Special theory of relativity
Studying Lorentz covariance of
4-force, Friedman and Scarr found not full covariance expressions for 4-force
in the form ![]() [8]
[8]
This led them to conclude that
the four-acceleration must be expressed with the
help of some antisymmetric tensor ![]() :
:
![]()
Based on the analysis of
different types of motion, they rated their required values of the components of
the acceleration tensor, thereby giving this tensor indirect definition.
From comparison with (6) it follows that the tensor ![]() up to a sign and a constant factor coincides
with the acceleration tensor
up to a sign and a constant factor coincides
with the acceleration tensor ![]() in case when rectilinear motion of a solid
body without rotation is considered. Then indeed the four-potential of the
acceleration field coincides with the four-velocity,
in case when rectilinear motion of a solid
body without rotation is considered. Then indeed the four-potential of the
acceleration field coincides with the four-velocity, ![]() . As a result, the quantity
. As a result, the quantity ![]() on the right-hand side of (6) vanishes, since
the following relations hold true:
on the right-hand side of (6) vanishes, since
the following relations hold true: ![]() ,
,
![]() . With this in mind, in (6) we can raise the
index
. With this in mind, in (6) we can raise the
index ![]() and
cancel the mass density, which gives the following:
and
cancel the mass density, which gives the following:
![]()
Mashhoon and Muench considered transformation
of inertial reference systems, related to accelerated frame of reference, and
came to the relation: [9]
![]()
Tensor ![]() has the same properties as the acceleration
tensor
has the same properties as the acceleration
tensor ![]()
Other theories
In the articles [10] [11] [12] devoted to the modified Newtonian dynamics (MOND), in
the tensor-vector-scalar gravity appear scalar function ![]() or
or ![]() , that defines a scalar field, and 4-vector
, that defines a scalar field, and 4-vector ![]() or
or ![]() , and 4-tensor
, and 4-tensor ![]() or
or
![]()
The analysis of these values in the corresponding Lagrangian
demonstrates that scalar function ![]() or
or ![]() correspond to scalar potential
correspond to scalar potential ![]() of the acceleration field; 4-vector
of the acceleration field; 4-vector ![]() or
or
![]() correspond to 4-potential
correspond to 4-potential ![]() of the
acceleration field; 4-tensor
of the
acceleration field; 4-tensor ![]() or
or ![]() correspond to acceleration tensor
correspond to acceleration tensor ![]() .
.
As it is known, the
acceleration field is not intended to explain the accelerated motion, but for
its accurate description. In this case, it can be assumed that the
tensor-vector-scalar theories cannot pretend to explain the rotation curves of
galaxies. At best, they can only serve to describe the motion, for example to
describe the rotation of stars in galaxies and the rotation of galaxies in
clusters of galaxies.
See also
- Acceleration field
- Electromagnetic tensor
- Gravitational
tensor
- Pressure
field tensor
- Dissipation
field tensor
- Acceleration
stress-energy tensor
- General field
- Dissipation field
- Pressure field
- Lorentz-invariant theory of gravitation
- Covariant
theory of gravitation
References
- 1.0 1.1 1.2 Fedosin S.G. About the cosmological constant,
acceleration field, pressure field and energy. Jordan
Journal of Physics. Vol. 9 (No. 1), pp. 1-30 (2016). http://dx.doi.org/10.5281/zenodo.889304.
- 2.0 2.1 Fedosin S.G. Lagrangian formalism in the theory of relativistic
vector fields. International Journal of Modern Physics A, Vol. 40, No. 02, 2450163 (2025). https://doi.org/10.1142/S0217751X2450163X.
- 3.0 .3.1 Fedosin
S.G. Equations of Motion in the Theory of Relativistic Vector Fields.
International Letters of Chemistry, Physics and Astronomy, Vol. 83, pp.
12-30 (2019). https://doi.org/10.18052/www.scipress.com/ILCPA.83.12.
- Fock V.A. The Theory of Space, Time and
Gravitation (Pergamon Press, London, 1959).
- Landau L.D., Lifshitz E.M. The Classical Theory
of Fields, (1951). Pergamon Press. ISBN 7-5062-4256-7.
- Fedosin S.G. Generalized Four-momentum for
Continuously Distributed Materials. Gazi University Journal of Science,
Vol. 37, Issue 3, pp. 1509-1538 (2024). https://doi.org/10.35378/gujs.1231793.
- Fedosin S.G. What should we understand by
the four-momentum of physical system? Physica Scripta, Vol. 99, No.
5, 055034 (2024). https://doi.org/10.1088/1402-4896/ad3b45.
- Yaakov Friedman and Tzvi Scarr. Covariant Uniform
Acceleration. Journal of Physics: Conference Series Vol. 437 (2013)
012009 doi:10.1088/1742-6596/437/1/012009.
- Bahram Mashhoon and Uwe Muench. Length measurement
in accelerated systems. Annalen der Physik. Vol. 11, Issue 7, P. 532–547,
2002.
- J. D. Bekenstein and M.
Milgrom, Does the Missing Mass Problem Signal the Breakdown of Newtonian
Gravity ? Astrophys. Journ. 286, 7 (1984).
- Bekenstein, J. D. (2004), Relativistic
gravitation theory for the modified Newtonian dynamics paradigm, Physical
Review D 70 (8): 083509, https://dx.doi.org/10.1103%2FPhysRevD.70.083509.
- Exirifard, Q. (2013), GravitoMagnetic Field in
Tensor-Vector-Scalar Theory, Journal of Cosmology and Astroparticle
Physics, JCAP04: 034, https://dx.doi.org/10.1088%2F1475-7516%2F2013%2F04%2F034.
External links
Source: http://sergf.ru/aten.htm